|
I am an Applied Scientist at Amazon, where I work on dexterous manipulation.
Google Scholar
•
GitHub
•
LinkedIn
•
CV
|
|
I'm interested in robot manipulation, task planning, and perception. My research interests lie at the intersection of robot manipulation, task planning, and perception. I am particularly focused on leveraging Reinforcement Learning (RL) and real-time, closed-loop control to solve complex problems. My goal is to equip robots with the intelligence to handle long-horizon tasks in dynamic industrial and domestic settings. My approach combines classical planning algorithms with modern deep learning and RL strategies, all of which are rigorously validated on both real and simulated robotic platforms to ensure robustness. |

|
Teng Guo, |
|
Kai Gao, Zihe Ye, Duo Zhang, |
|
|
Haonan Chang, Kai Gao, Kowndinya Boyalakuntla, Alex Lee, |
|
|
|
|
|
|
|
|
Xiang Zhang, Siddarth Jain, |
|
|
|
|
|
Kai Gao, Darren Lau, |
|

|
Yuhan Zhao, |
|
|
|
Shuai D Han, |
|
|

|
Luke Eller*, Théo Guérin*, |
|
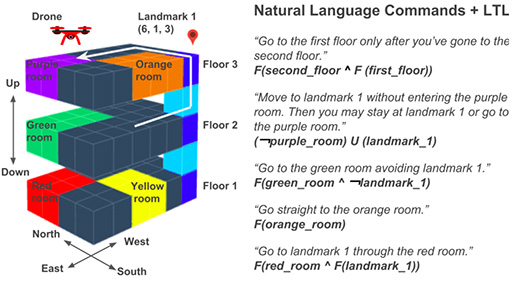
Yoonseon Oh, Roma Patel, Thao Nguyen, |

|
|
|
|
|
|
|
|
Layout from Jon Barron, style from Shuran Song. Last update on Oct 2025 |